
- 82
- 4 697 198
Biomimetics MIT
Приєднався 27 гру 2011
Read more about the MIT Biomimetic Robotics Lab!
biomimetics.mit.edu/
biomimetics.mit.edu/
Learning Emergent Gaits with Decentralized Phase Oscillators - ICRA 2024
Title: Learning Emergent Gaits with Decentralized Phase Oscillators: on the role of Observations, Rewards, and Feedback
Abstract: We present a minimal phase oscillator model for learning quadrupedal locomotion. Each of the four oscillators is coupled only to itself and its corresponding leg through local feedback of the ground reaction force, which can be interpreted as an observer feedback gain. The oscillator itself is interpreted as a latent contact state-estimator. Through a systematic ablation study, we show that the combination of phase observations, simple phase-based rewards, and the local feedback dynamics induces policies that exhibit emergent gait preferences, while using a reduced set of simple rewards, and without prescribing a specific gait.
code: github.com/mit-biomimetics/ORCAgym
preprint: arxiv.org/abs/2402.08662
Abstract: We present a minimal phase oscillator model for learning quadrupedal locomotion. Each of the four oscillators is coupled only to itself and its corresponding leg through local feedback of the ground reaction force, which can be interpreted as an observer feedback gain. The oscillator itself is interpreted as a latent contact state-estimator. Through a systematic ablation study, we show that the combination of phase observations, simple phase-based rewards, and the local feedback dynamics induces policies that exhibit emergent gait preferences, while using a reduced set of simple rewards, and without prescribing a specific gait.
code: github.com/mit-biomimetics/ORCAgym
preprint: arxiv.org/abs/2402.08662
Переглядів: 1 206
Відео


Bi-Modal Hemispherical Sensor IROS2019
Переглядів 2,5 тис.4 роки тому
Meng Yee (Michael) Chuah, Lindsay Epstein*, Donghyun Kim, Juan Romero, Sangbae Kim, "Bi-Modal Hemispherical Sensor: A Unifying Solution for Three Axis Force and Contact Angle Measurement" Conference: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).

Stress Field force sensor -Inertial Noise
Переглядів 1,7 тис.4 роки тому
Stress Field force sensor -Inertial Noise

Bi-Modal Hemispherical Sensors for Dynamic Locomotion and Manipulation
Переглядів 3 тис.4 роки тому
L. Epstein, Andrew SaLoutos, Donghyun Kim, Sangbae Kim, Bi-Modal Hemispherical Sensors for Dynamic Locomotion and Manipulation, Conference: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems.

Extracting Legged Locomotion Heuristics with Regularized Predictive Control
Переглядів 3,9 тис.4 роки тому
ICRA2020
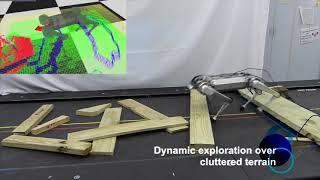
Vision-aided Dynamic Exploration of Unstructured Terrain ICRA 2020
Переглядів 9 тис.4 роки тому
Vision-aided Dynamic Exploration of Unstructured Terrain ICRA 2020

Regularized Predictive Control Minicheetah demo compilation
Переглядів 17 тис.4 роки тому
Regularized Predictive Control Minicheetah demo compilation

Testing 9 New Mini Cheetahs
Переглядів 3,4 млн4 роки тому
Playing with our 9 new mini cheetah robots in Killian Court

Highly Dynamic Quadruped Locomotion via Whole-Body Impulse Control and Model Predictive Control
Переглядів 18 тис.4 роки тому
Donghyun Kim, Jared Di Carlo, Benjamin Katz, Gerardo Bledt, and Sangbae Kim Highly Dynamic Quadruped Locomotion via Whole-Body Impulse Control and Model Predictive Control Paper available at arxiv.org/abs/1909.06586
Dynamic Locomotion in the MIT Cheetah 3 Through Convex Model Predictive Control
Переглядів 14 тис.4 роки тому
Dynamic Locomotion in the MIT Cheetah 3 Through Convex Model Predictive Control
HERMES System - 2016 UAE Robots for Good Competition
Переглядів 19 тис.8 років тому
HERMES System from MIT entry for the 2016 UAE Robots for Good Competition.
MIT Cheetah: New Design Paradigm Shift toward Mobile Robots
Переглядів 3,2 тис.8 років тому
Recent technological advances in legged robots are opening up a new era of mobile robotics. In particular, legged robots have a great potential to help disaster situations or elderly care services. Whereas manufacturing robots are designed for maximum stiffness, allowing for accurate and rapid position tracking without contact, mobile robots have a different set of hardware/software design requ...
MIT Cheetah Street Walking 2014 Dec 22
Переглядів 11 тис.8 років тому
This may be the first time in history that a legged robot walked in the street with people.
MIT Cheetah robot 2 running fast and jump over an obstacle
Переглядів 258 тис.9 років тому
MIT Cheetah robot 2 running fast and jump over an obstacle
MIT Cheetah robot helps with the Ice Bucket Challenge, by Sangbae Kim
Переглядів 26 тис.9 років тому
MIT Cheetah robot helps with the Ice Bucket Challenge, by Sangbae Kim
Bio-inspired robotics class Exhibition at the building 7 lobby of MIT
Переглядів 8 тис.10 років тому
Bio-inspired robotics class Exhibition at the building 7 lobby of MIT
Hopping Robot "Hopping for Apples" Simulation
Переглядів 5 тис.10 років тому
Hopping Robot "Hopping for Apples" Simulation
Can I have a sample for this code? Thanks.
Is this code avaible publicly?
Why do I always imagine them fighting when I see something like that? That probably comes from human sin, right?
Turns out this changed everything
It's a cute robot, as long as you don't mind the idea of a human-sensing, automatic-firing version of this robot running towards you.
Great work! I might download the repository and see if it can be expanded to a variety of terrains that may have different optimal gaits.
Please do, and share your results! :) We also think robots with different morphologies might naturally tend towards different gaits.
Nice!!👍🏻
güzel içerik!
i love that they can flip
Genuinely might have to save up and by one
I wish we had more of theses lectures on this channel.
I have read your paper "Dynamic Locomotion in the MIT cheetah through convex MPC", it is great. However, I did not understand how you measured/estimated the velocity of the COM (which is one of the variables of the State Space). Can you please explain?
can i get code please
Boys and toys. ❤
Cheetahs who can't run obviously what an appropriate name
any update on when this will be available for public
Wake up babe, footage of the first Blade Runner dog park dropped.
nerds are dangerous
Que maravilla cuando van a estar disponibles en amazon.
Great Job, but your paper is a bit cryptic. in the MPC formulation what is x0, how is expressed what it is inside. I find great difficulties to understand how to implement expression 32 ( the equation g = 2B'L(Ax0 -y). y was never mentioned before too, what is it?
I do love this! Am not scared by this. Excellent scientists and brilliant engineering have created something New! ..
2:12 so cute🥰
LOLz
Love the technology, but I think we all know where this can lead.
😳
Think it's cute now... but later they may just be the last thing you see :/
wish this design was kept and just improved, the cheetah now literally looks like a toaster with legs lol, if they kept this design and just kept improving it i have no doubt they would surpass boston dynamics
A good platform to mount an AR-15.
they started with a dog model so human don't freak out . What people don't know is they already got humanoid version in their labs
редкостное бюджетное говно, в коротком замыкании и в Американском пироге роботы выглядели лучше, то что они сальто делают это где нибудь в быту промышленности применить можно?, в свое время компьютер полностью управлял челноком Энергия -Буран, но на изделие упала крыша и похоронила его в начале двух тысячных...
I can imagine an MIT student just riding this to class
Can u plz make robotic wolves?
they look like they're auditioning for a job
Im afraid 🤦♀️🙃🤭😥😯
OMG unbeliveable
They have come a long way with robots , It’s going to be interesting how it will eventually effect ALL jobs around the world .
ОДЕНЬТИ ИХ ......
👏👏👏👍👍👍👍🤭🤗👌👌👌👌👌🙏🙏.
I guess that's why I didn't get into MIT
Oh my goodness so cute
does anyone know in which country recording?
They just look like grass hoppers
They look more like frogs than cheetahs 🐸
I thought they were cute till 2:00
I’ll take 20
I kind of forget those things aren't really alive.
How was it a riot on Capitol Hill with all this going on
Her: "He's probably cheating right now" Me and the boys: 0:29
🤣🤣🤣
The noiSe....